
RViz
▪︎ ROS의 3D 시각화툴
로서 센서 데이터, 레이저 거리 센서(LDS) 센서의 거리 떼이터, RealSense, Kinect, Xtion 등의 Depth Camera의 포인트 클라우드 데이터, 카메라의 영상 데이터, IMU 센서의 관성 데이터 등의 시각화를 가능하게 함.
▪︎ 로봇 외형의 표시와 계획된 동작을 표현
URDF -> 드론, 휴머노이드 로봇이든 URDF 형태로만 기술해놓으면 RViz에서 시각화 가능
▪︎ navigation
▪︎ manipulation
▪︎ 원격 제어
RViz 설치
sudo apt-get install ros-kinetic-rviz
RViz 실행
rosrun rviz rviz
rviz
RQT
▪︎ 플러그인 방식의 ROS의 종합 GUI 툴
▪︎ ROS Fuerte 버전부터는 rqt라는 이름으로 기존의 rxbag, rxplot, rxgraph 등이 통폐합되어 rqt_bag, rqt_plot, rqt_graph 등을 프러그인으로 하는 ROS의 종합 GUI 툴로써 사용 가능해졌다.
▪︎ rqt는 Qt로 개발되어 있기 때문에 유저들이 자유롭게 플러그인을 개발하여 추가할 수도 있다.
RQT 설치
sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-pluginsRQT 실행
rqt
RQT 실습 #1 : rqt_image_view
rqt_image_view
rostopic list
다음 명령어를 치면, 현재 전송되거나 등록된 토픽을 확인할 수 있다.
RQT 실습 #2 : rqt_graph
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
rosrun uvc_camera uvc_camera_node
rosrun image_view image_view image:=image_raw
rqt_graph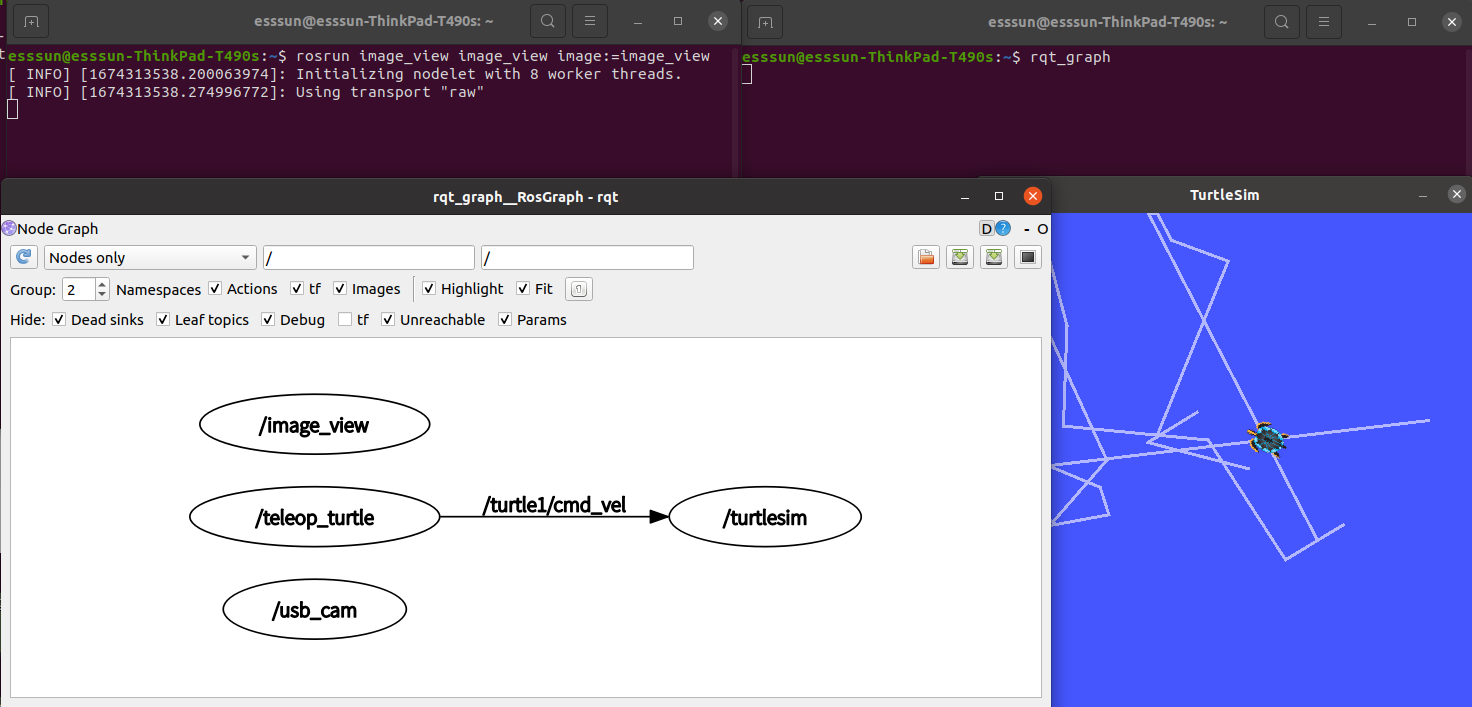
현재 노드 네트워크 상에 구동하고 있는 노드 및 노드와 노드 사이에 주고받는 메시지를 확인할 수 있다.
RQT 실습 #3 : rqt_plot
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
rqt_plot /turtle1/pose/
RQT 실습 #4: rqt_bag
rosrun uvc_camera uvc_camera_node
rosbag record /image_raw
rqt_bag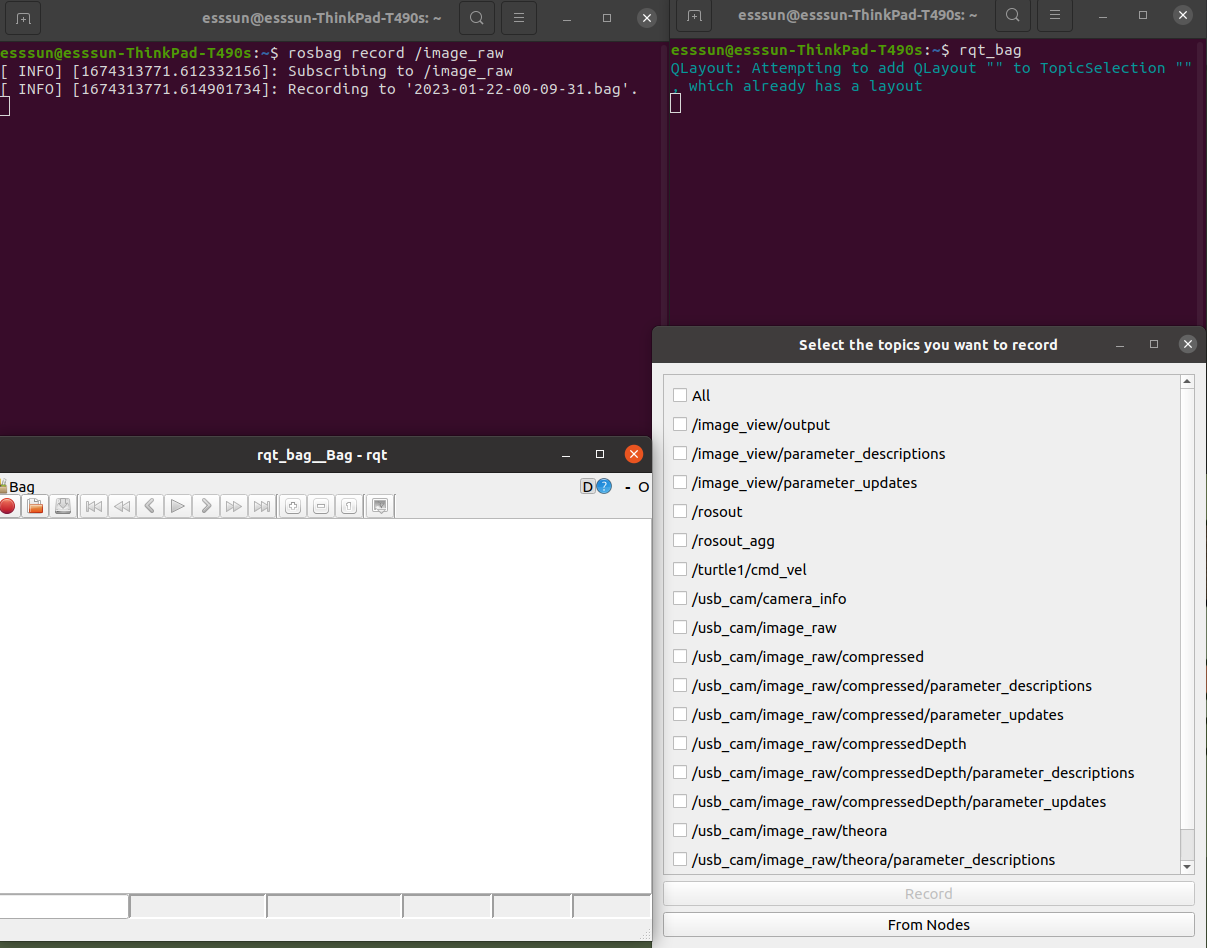
Gazebo
▪︎ Gazebo는 로봇 개발에 필요한 3차원 시뮬레이션을 위한 로봇, 센서, 환경 모델 등을 지원하고 물리 엔진을 탑재하여 실제와 근사한 결과를 얻을 수 있는 3차원 시뮬레이터
▪︎ 미국 DARPA Robotics Challenge의 공식 시뮬레이터
▪︎ ROS와의 호환성이 매우 좋다.